玩穿越机离不开3D打印这个话题,3D打印机有很多结构,我们可以根据自己的预算和要求选择。根据XYZ各轴运动方式的结构,可以分为以下几大类:
结构1
◆
Reprap
◆
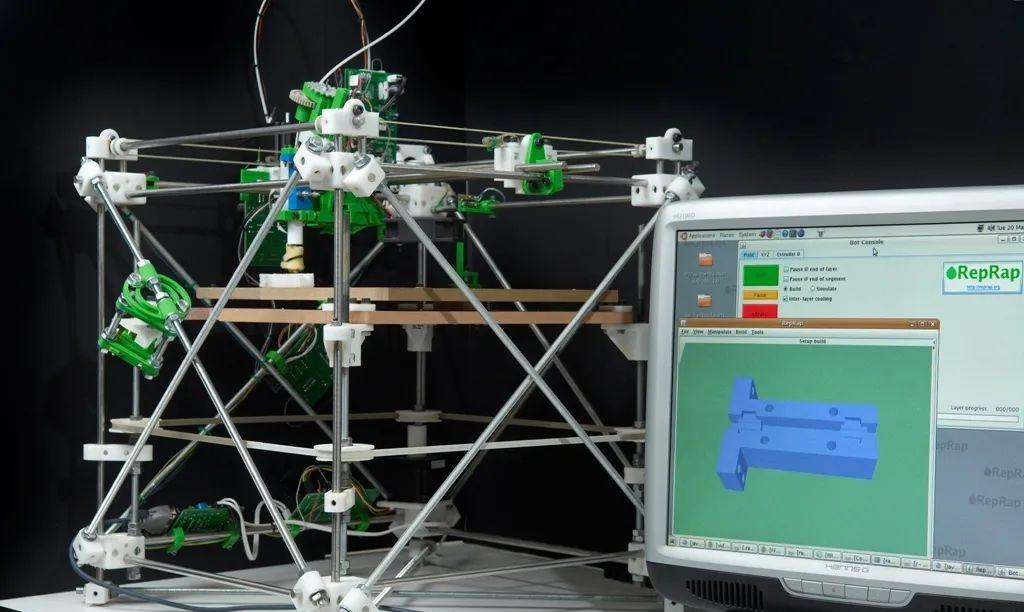
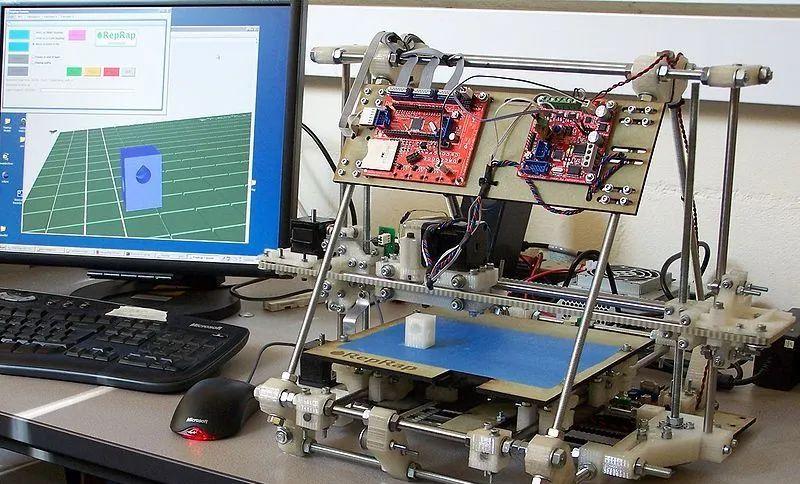
reprap的打印机看起来都挺复杂,是因为设计者的初衷就是想让机器能够复制自己,因此希望各个组成部分都可以通过3d打印得到(仅仅是理想,实际还差挺远)。因此设计了光杆框架结构的支撑。从实用性上来讲,这种框架结构,首先对装配调结的要求就很高,其次,主要部件包括电路板都外露,像个半成品。
reprap2.0
因为方形的结构的稳固性和调整困难,所以第二代reprap 改成了三角框架结构 ,如下图:
结构2
◆
Prusai3/龙门
◆
Prusa i3简称:i3,这是最古老的机型,没有之一,也是目前最常见的一种。成本低,结构简单,精度一般,速度慢。平台容易晃。最明显的一个特征是:打印平台前后运动实现Y轴运动。喷头在X轴上左右运动。整个X轴上下运动实现Z轴运动。Z轴两个电机。
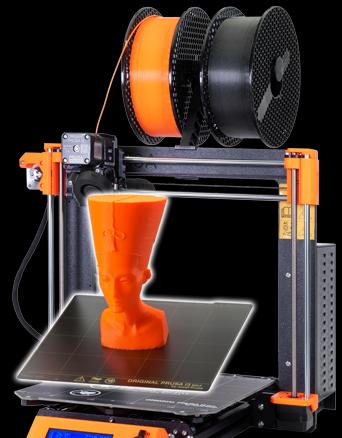
i3由于是平台移动,只能做小型机器。做大了、高了以后,模型会晃动,容易打印失败。所以大的机器都没有人会选择i3这种结构。
优点:1.框架相对比较简单,简单的龙门架,比较节省材料,所以相对而言价格也比较便宜,适合初级入门,DIY的成本也比较低,大概1000~2000元左右。2.近程送丝,可以打印柔体耗材TPU。缺点:1.Y方向为平台移动,由于平台重量比较大,打印时惯性自然就大,增加了步进电机和同步带的负荷,会加快同步带磨损;同时打印较快时,无法保证打印精度。2.Z方向双丝杆带动挤出头上下移动,由于丝杆的精度无法做到完全一致,长时间打印后,就会出现两边不齐平的情况,影响打印效果。我之前就遇到过类似情况,解决办法是用游标卡尺测量两边离步进电机是否一致,如果不一致就手动调整丝杆,做下微调。3.机器占地面积大,平台是Y轴方向移动,所以需要的面积比较大。4.一般i3结构的机器为了压缩成本,都做得比较简单,开关电源外置,可能会带来安全隐患。5.喷头模块使用的是单风道,只能吹到打印模型的一侧,另一侧无法及时冷却,非常影响打印质量。
结构3
◆
Makerbot
◆
这个结构是一个比较稳定的机型。成本中等,打印精度中等,速度一般。调试相对简单些。适合做大机器。XYZ最明显的特征是:X轴电机固定在X轴上。Y轴移动要连着X轴电机一起移动。Y轴惯性较大,跑不快。打印速度快了,容易丢步。
优点:
1. 四四方方的结构,外框架稳定。2. Z轴由两根光轴固定,平台运动时稳定性好,震动小,打印精度得到保证。3. 近程送丝,可以打印柔体耗材,比如:TPU。缺点:1. 由于挤出头的原因导致机器内部空间利用率较低,相对于并联臂而言,稍微好一点。2. 由于挤出头设计的问题导致无法快速散热,散热效率不高,所以比较容易堵头。3. 单风道,只能吹到打印模型的一侧,另一侧无法及时冷却,打印质量得不到保证。
结构4
◆
Uilimaker/UM
◆
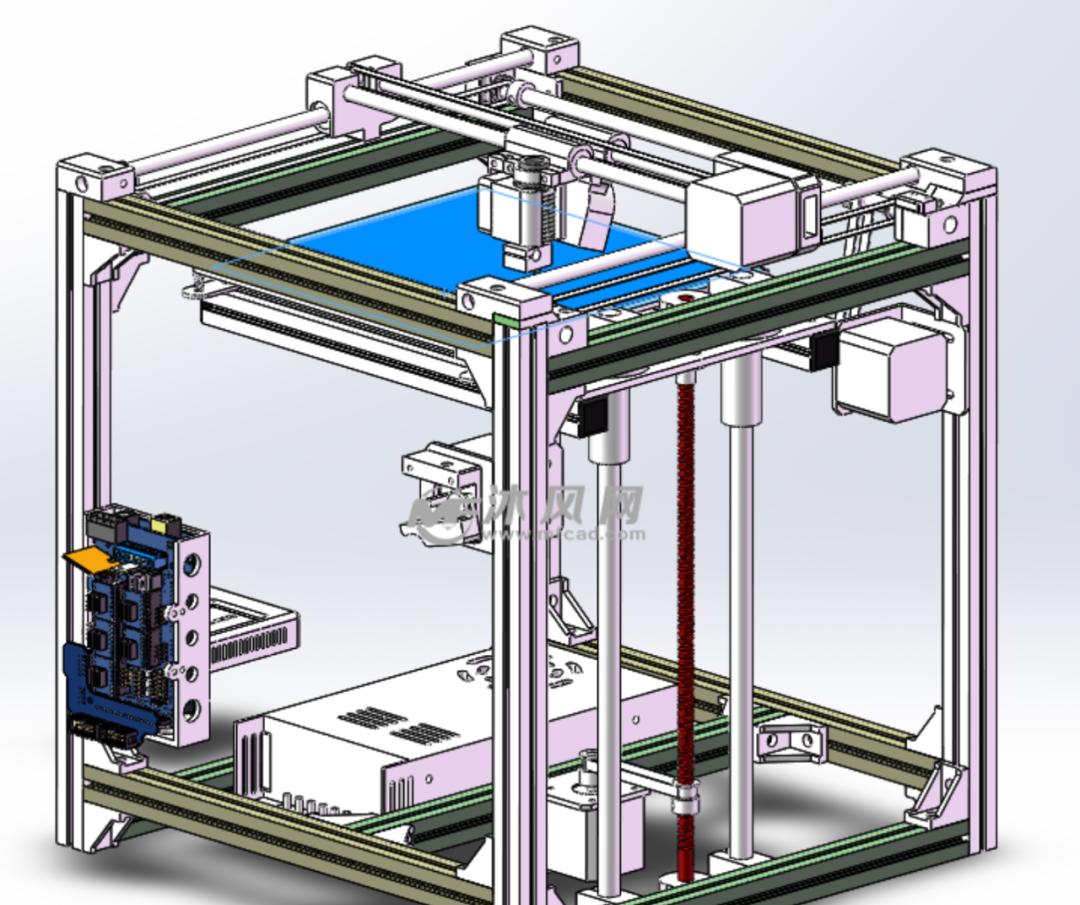
UM全称Ultimaker,也是结构名称,又叫十字轴。成本高,速度快,精度高。UM的XY电机都是固定在机箱上的。结构比较复杂,对零件、安装要求比较高。由于电机都是安装在机箱上的,所以打印速度快、精度也相对高。
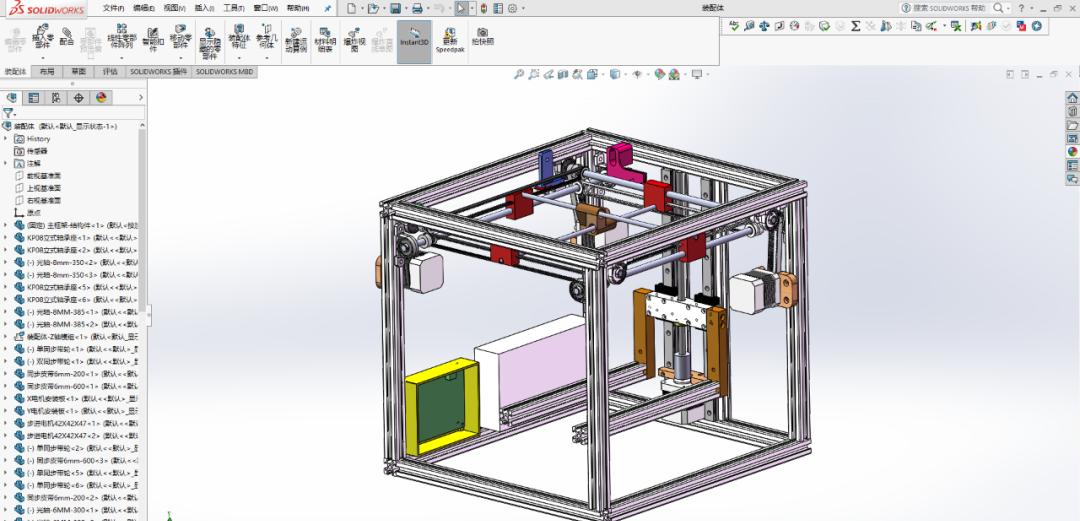
优点:1.机器内部空间利用率高,在i3、并联臂、MB、UM四种结构中,UM结构的内部空间利用率是最高的。2.远程送丝,喷头重量轻,打印速度快。考虑精度原因,一般打印速度设置为60mm/s。3.喷头由两根光轴固定,十字轴,打印时稳定,保证了打印精度4.Z轴两根光轴固定,平台运动时稳定性好,震动小,打印精度得到保证。5.双风道,打印时模型冷却速度更快。缺点:1. Ultimaker的挤出机没有压片,换料时只能用内六角调节弹簧的压缩力度,所以导致换料比较麻烦,而且进料时如果对不准铁氟龙的孔,容易被铁氟龙管挡住。2. 控制喷头移动的X、Y轴及十字轴装配比较困难。
3. X轴方向的小闭口同步带如果磨损太严重,需要更换时,要拆掉整根光轴,十分麻烦。4. 远程送丝,如果打印时频繁回抽,气动接头容易损坏。
结构5
◆
国Kossel/三角洲
◆
三角洲又称Delta。也叫并联臂。这种结构最早是由瑞士洛桑理工学院(EPFL)的Reymond Clavel教授在上世纪80年代发明的Delta式结构。最早的Delta式并联机械臂主要用来设计一种能以很快速度操作轻小物体的机器人。Delta式并联机械臂,这是一种通过一系列互相连接的平行四边形来控制目标在X、Y、Z轴上的运动的机械结构。近年来这种机械结构的应用日益广泛,特别是它具有适应狭小空间,并能在其中有效工作的能力。1987年瑞Demaurex公司首先购买了delta机器人的知识产权并将其产业化,主要用于巧克力、饼干、面包等食品包装,后来由于硬件和软件工程的发展带来的技术和制造成本下降,很多创客在设计自己的3D打印机是借鉴了这种Delta并联式机械臂的特点,于是就出现了如今我们常见的外形接近三角形柱体的Delta式3D打印机,玩家们称为三角洲打印机。三角洲的结构相对简单。打印曲面效果不错,打印速度快。但打印矩形容易出问题。空间利用率比较低。
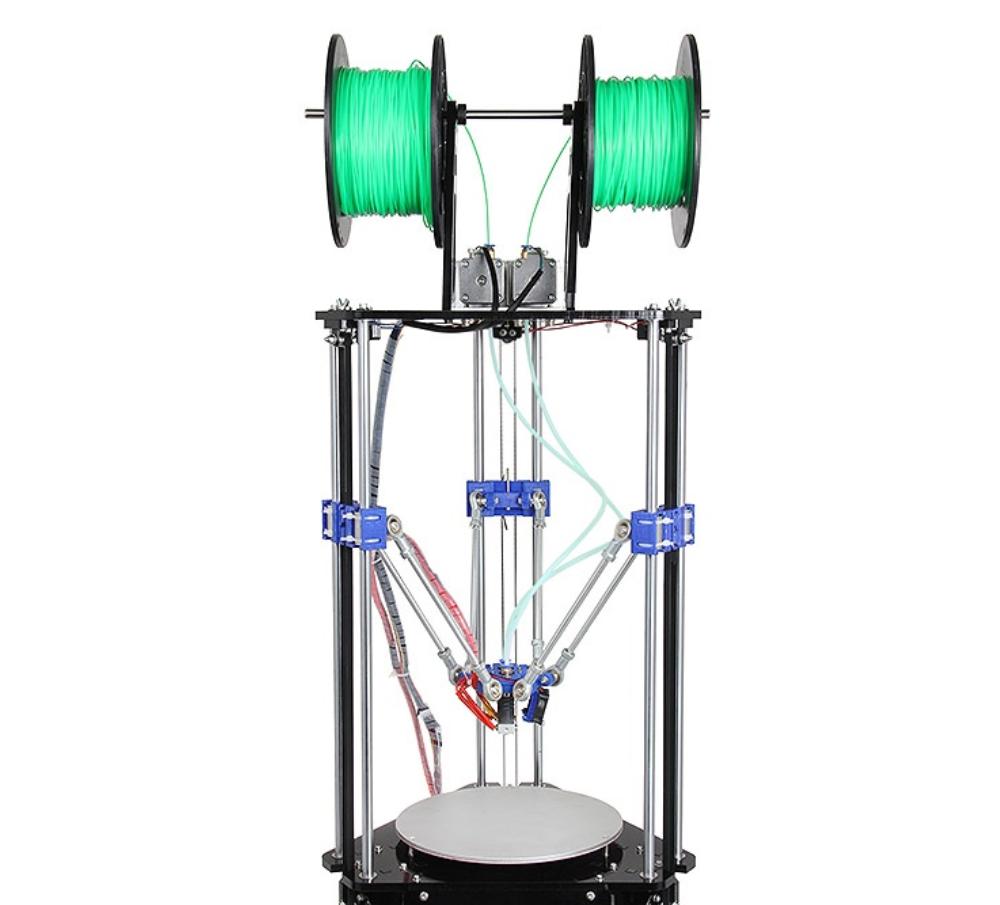
在同样的成本下,采用delta型能设计出打印尺寸更高的3D打印机。三轴联动的结构,传动效率更高,速度更快。但是由于delta的坐标换算是采用插值的算法,弧线是用很多条小直线进行插值模拟逼近的,小线段的数量直接影响着打印的效果,造成delta的分辨率不足打印精度相对略有下降。
优点:1. 占地面积小。2.并联臂结构,框架简单,使用铝型材DIY时,框架大小方便定制。▼3.它的喷头移动灵活,打印时设置回抽抬升喷头可有效减少拉丝。其它结构无法做到灵活地抬升喷头。4.远程送丝,使用E3D喷头,重量轻,打印速度比较快。5.E3D的挤出头,散热性能好,不易堵头。缺点:1.前面说了占地面积小,但是它的打印机内部空间利用率很低。机器越高,空间利用率越低。2.并联臂最大的缺点就是调平困难,由于它的平台是固定的,如果没有自动调平,那么调平只能通过软件或者手动调整XYZ三个方向的偏置参数来调平,特别麻烦。3.远程送丝,如果打印时频繁回抽,气动接头容易损坏。
结构6
◆
H-bot
◆
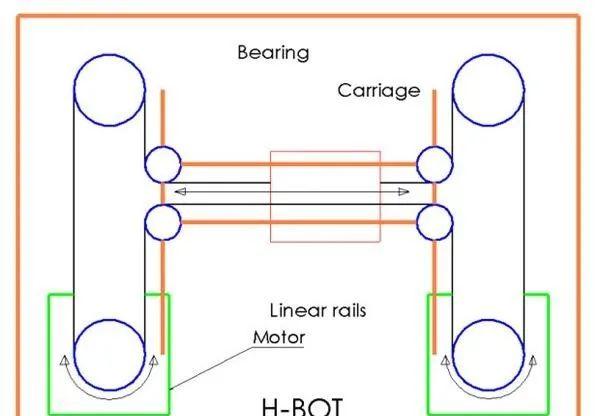
Hbot结构空间利用率高,相对比较稳定。但Hbot结构的Y轴移动是由一个电机拉X轴的一角实现Y轴移动。会产生使X轴旋转的力。打印速度慢时就不明显,但打印速度快就很明显了。X轴喷头移动也一样.
结构7
◆
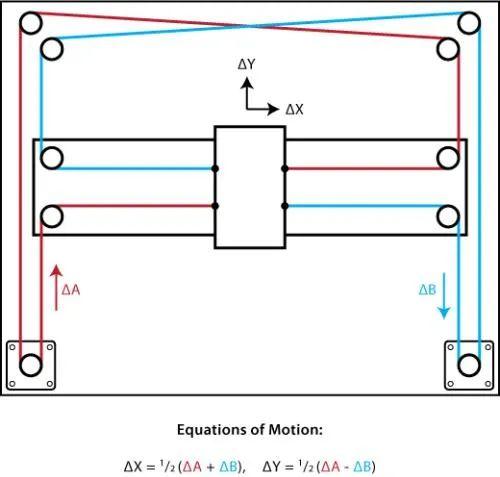
CoreXY
◆
Core XY结构跟Hbot结构非常相似。很多新人都分不清。Core XY结构空间利用率高,X轴相对重量轻。可以快速打印。但只能用皮带传动,不能用丝杆传动。